
Ian Servin's SkyWatch project demonstrates how consumer PTZ cameras combined with sophisticated software algorithms can replicate professional aviation surveillance capabilities at a fraction of the cost.
Professional aviation surveillance systems rely on EO/IR (Electro-Optical/Infra-Red) gimbals – gyro-stabilized turrets capable of maintaining visual locks on fast-moving targets regardless of aircraft maneuvers. These systems typically cost tens of thousands of dollars, putting them out of reach for civilian use. Ian Servin's Project SkyWatch challenges this status quo by recreating similar functionality using affordable consumer hardware and custom software algorithms.
The project centers around overcoming fundamental hardware limitations. 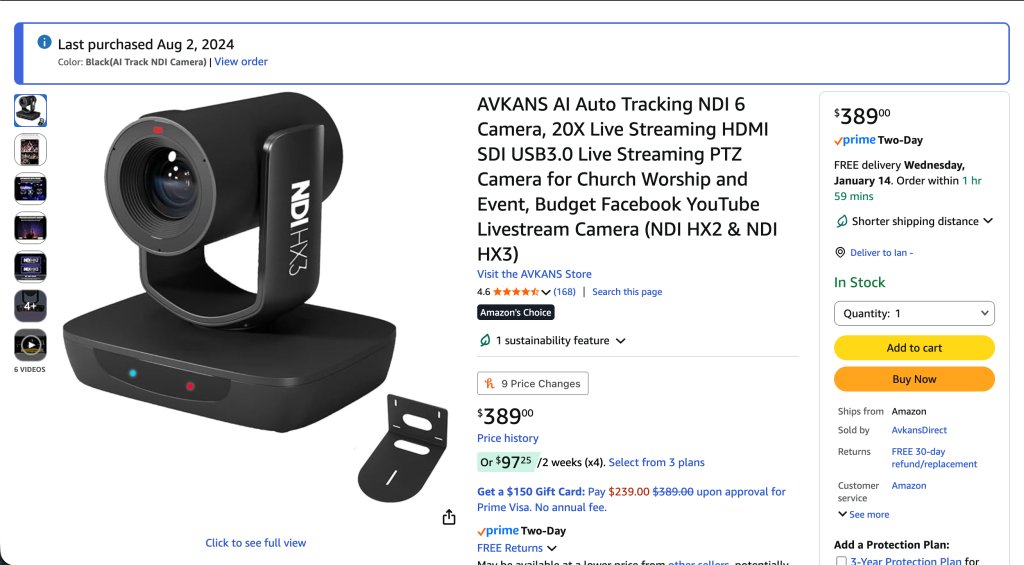 Servin selected the AVKANS LV20N, a $389 PTZ (Pan-Tilt-Zoom) camera designed for church services and lecture halls. Unlike military-grade gimbals, these cameras suffer from significant mechanical latency: their motors move slowly, their plastic gears introduce play, and their electronics introduce processing delays. Directly commanding the camera to follow a fast-moving aircraft results in the target leaving the frame before the motors react.
Servin's solution shifts complexity from mechanics to software through a multi-layered processing stack:
Visual Processing: Using OpenCV with CSRT (Channel and Spatial Reliability) tracking, the system identifies aircraft based on texture and visual features rather than simple contrast. This provides pixel-accurate positioning data frame-by-frame.
Prediction Engine: A Kalman filter models the aircraft's position and velocity while filtering sensor noise. Crucially, it predicts the target's position 200ms ahead to compensate for system latency. This feed-forward control allows the camera to lead the target instead of chasing it.
Hybrid Control System: A PID (Proportional-Integral-Derivative) controller works alongside the Kalman predictions:
- Proportional control corrects immediate positioning errors
- Integral control addresses steady-state errors like wind effects
- Derivative control prevents overshoot and oscillation
- Dynamic speed scaling adjusts motor aggressiveness based on target distance
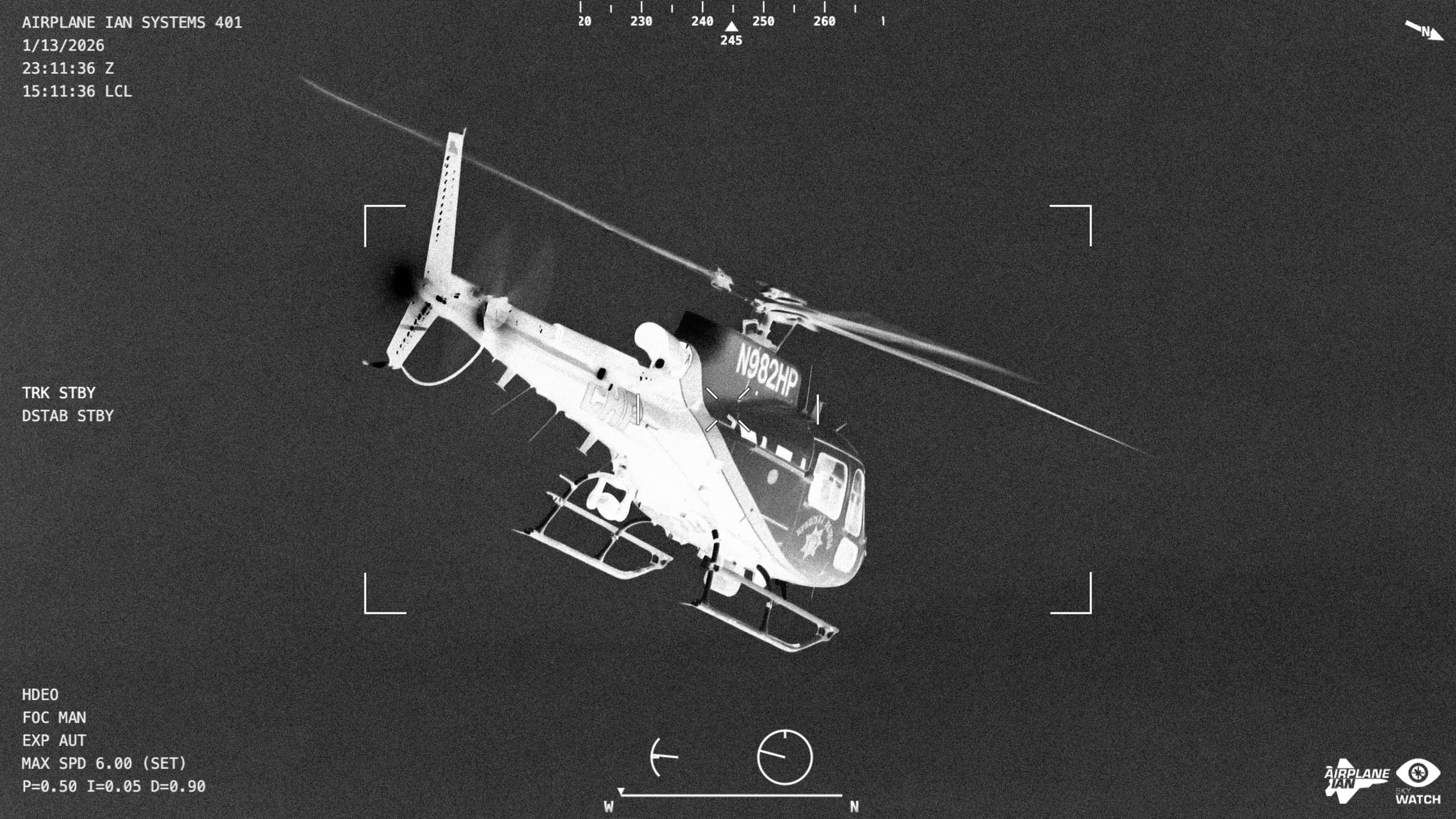
Despite these controls, mechanical limitations remained. Servin implemented a "virtual gimbal" that digitally stabilizes the image by cropping the sensor and shifting frames in real-time. This software layer counteracts gear slack and electronic latency, producing stabilization comparable to professional systems.
During field tests tracking news helicopters, the system demonstrated remarkable stability when combining optical tracking with ADS-B telemetry integration. By correlating visual data with aircraft transponder information via a local ADS-B receiver, SkyWatch adds contextual identification to its visual tracking.
The project (available on GitHub under MIT license) exemplifies "sousveillance" – civilian monitoring of monitoring systems. By reverse-engineering the principles behind military ISR (Intelligence, Surveillance, and Reconnaissance) technologies using accessible components, Servin provides both a functional tool and critical insight into aerial surveillance mechanics. The implementation proves that sophisticated tracking capabilities no longer require defense-contractor budgets when modern algorithms compensate for hardware limitations.
Comments
Please log in or register to join the discussion