A new DIY project demonstrates how an ESP32 microcontroller combined with a time-of-flight sensor and IMU can create a functional room mapper for approximately $30, enabling 3D scanning and mapping capabilities previously requiring expensive equipment.
A new open-source hardware project demonstrates how makers can build a functional room mapper using affordable components totaling around $30. Created by developer Henrique Ferrolho, the system combines an ESP32 microcontroller with a VL53L5CX time-of-flight sensor and BNO085 inertial measurement unit (IMU) to generate detailed spatial data.
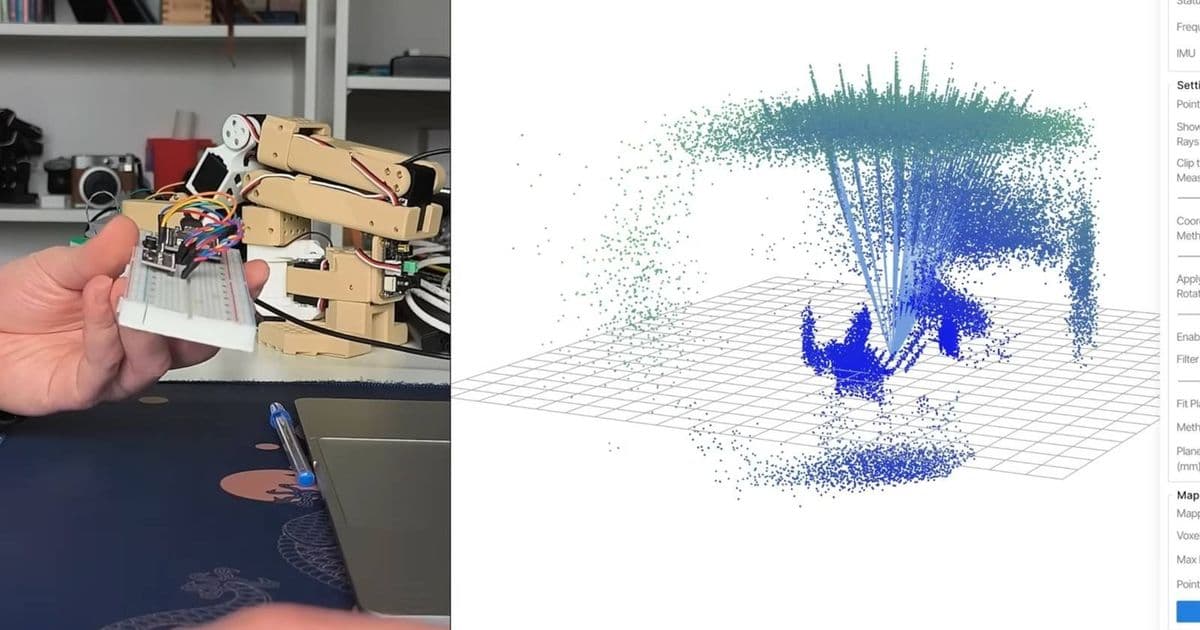
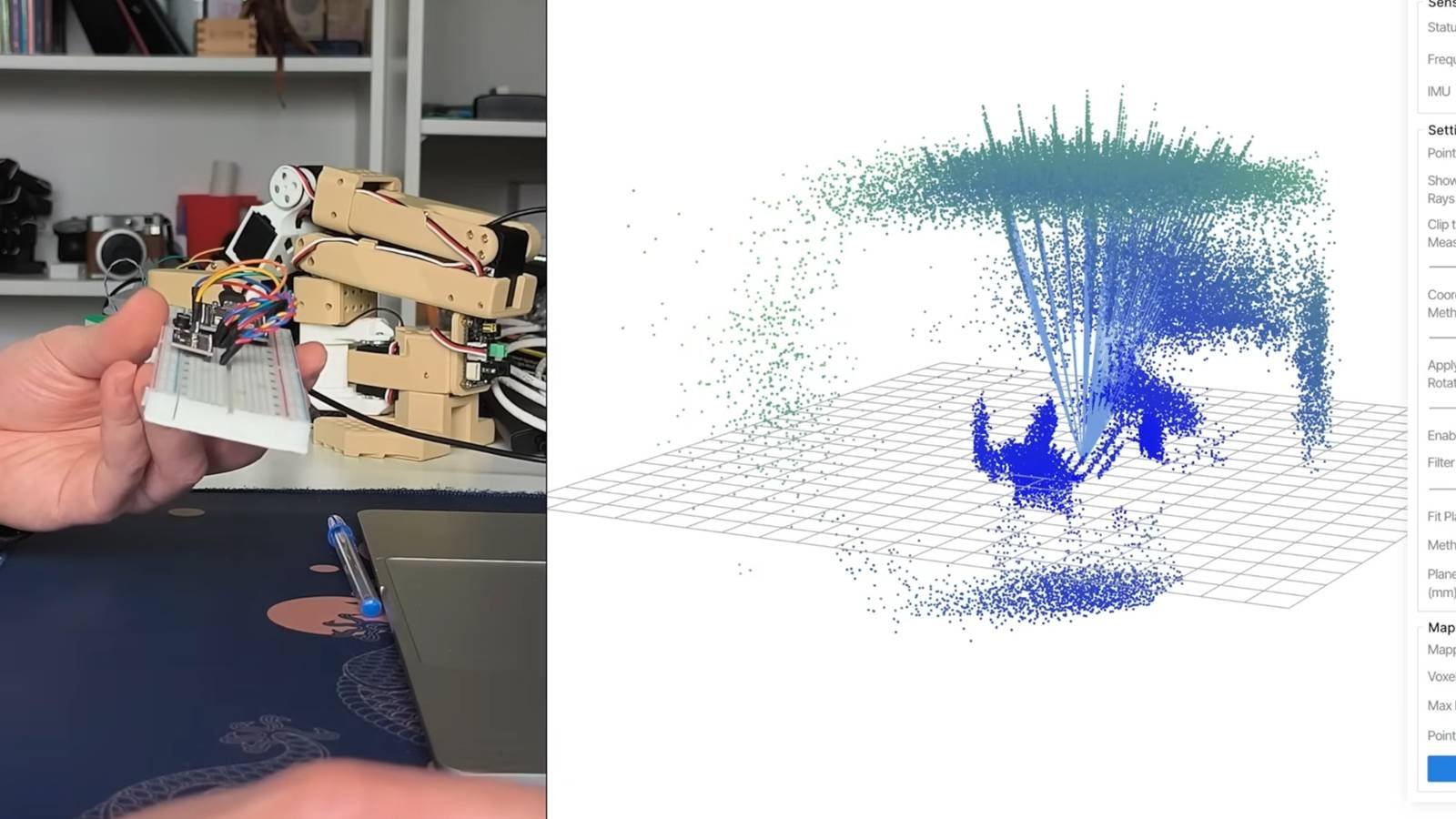
The core hardware configuration is straightforward: The ESP32-S3 microcontroller handles processing duties while the VL53L5CX ToF sensor captures distance measurements across a 64-zone grid. This sensor uses infrared laser pulses to calculate distances with millimeter precision. Meanwhile, the BNO085 IMU tracks movement and orientation through its integrated accelerometer, gyroscope, and magnetometer.
Software implementation transforms these components into a spatial mapping tool. Key technical features include:
- 64-Zone 3D Visualization: The ToF sensor's 8x8 measurement grid is represented as rays in three-dimensional space, creating a point cloud of the environment
- Real-Time IMU Tracking: Orientation data from the BNO085 rotates the virtual view to match physical movement
- Temporal Filtering: An exponential moving average algorithm smooths noisy sensor readings
- Plane Fitting: Implements both least squares and RANSAC algorithms for surface detection
- Mapping Mode: Accumulates points over time to build persistent 3D maps
The project requires only breadboard assembly with no soldering, making it accessible to beginners. Power comes via USB connection, and visualization occurs through a web interface hosted directly on the ESP32. The firmware is built on Espressif's ESP-IDF framework (version 5.1.2), leveraging FreeRTOS for task management.
While impressive for its price point, the implementation has limitations. The IMU-only heading reference means aggressive movement causes drift in the spatial data, resulting in distorted maps if users move the device too quickly. This could potentially be mitigated through sensor fusion techniques or adding complementary sensors.
The project exemplifies the expanding capabilities of ESP32-based systems for spatial computing applications traditionally requiring expensive equipment. With growing ecosystems for both ESP-IDF and Arduino frameworks, developers can extend functionality using existing libraries for point cloud processing and sensor integration.
Complete build instructions, firmware source code, and configuration details are available on GitHub. For visual demonstrations of the mapper in action, Ferrolho's YouTube tutorial provides comprehensive operation examples.
Comments
Please log in or register to join the discussion