New research analyzing reaching movements in monkeys challenges conventional motor control theories, showing trajectory selection prioritizes maintaining a 'safe kinetic energy range' rather than minimizing energy or maximizing straightness. This energy-flexibility tradeoff offers insights for developing more adaptive robotics and rehabilitation systems.
What determines the path your hand takes when reaching for a coffee cup? While infinite trajectories are theoretically possible, our motor system consistently selects specific paths. New neuroscience research reveals this isn't about choosing the most direct route or the most energy-efficient path, but rather maintaining an optimal energy-flexibility balance—a discovery with significant implications for robotics and rehabilitation technology.
Challenging Decades of Motor Control Theory
For over 50 years, neuroscientists have debated how the brain selects movement trajectories. Two dominant theories suggested planning occurs either in:
- Hand space: Prioritizing straight-line paths (Flash and Hogan's minimum jerk theory)
- Joint space: Optimizing joint coordination (Uno's minimum torque-change model)
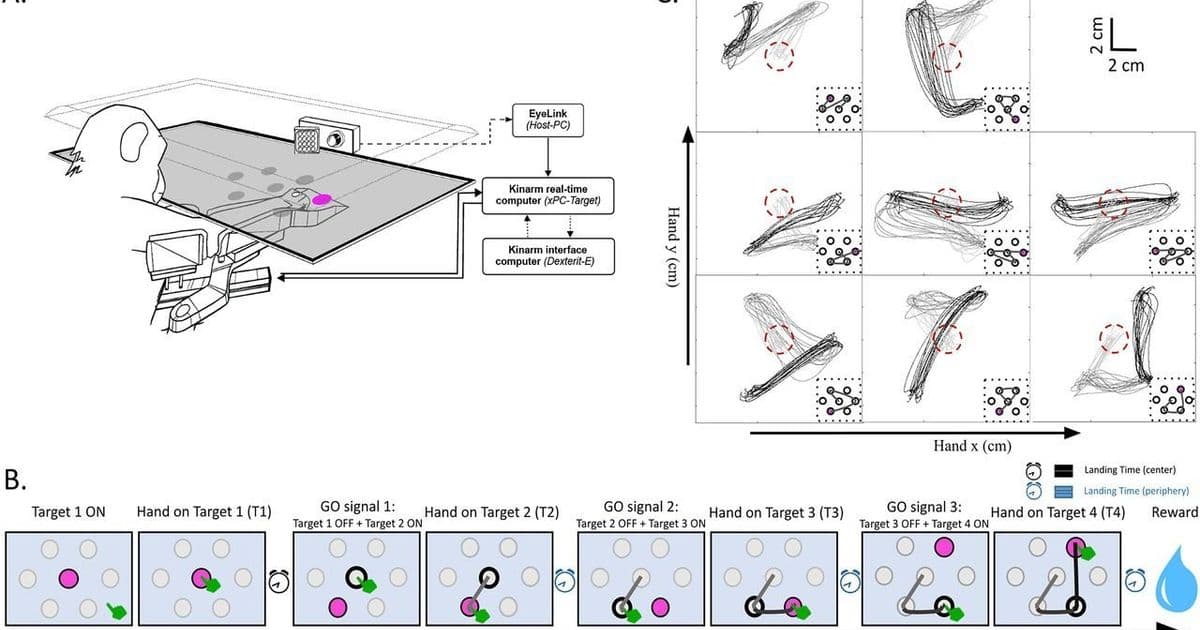
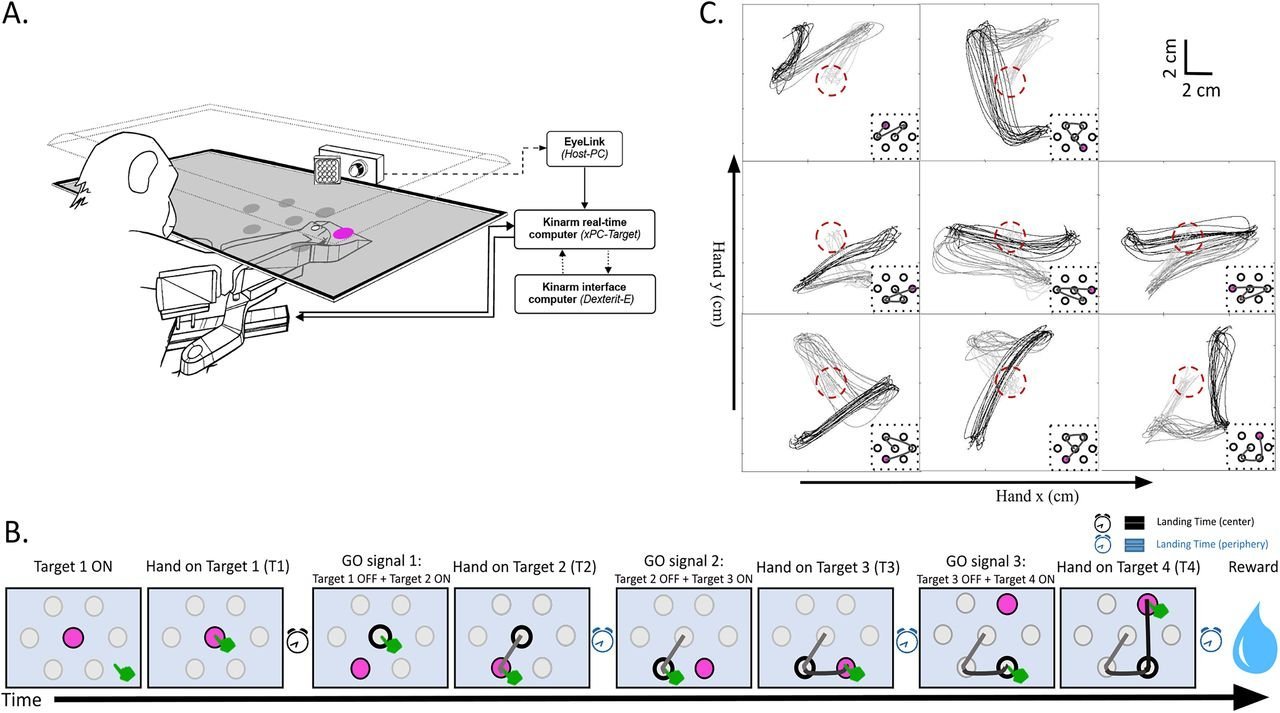
Researchers from Aix-Marseille Université conducted a longitudinal study with two rhesus monkeys performing thousands of reaching tasks in a biomechanically constrained 2D setup. Their findings, published in eNeuro, upend both theories.
"Our data show no evidence of a universal planning space," the researchers noted. "Neither hand nor joint space consistently exhibited the straight trajectories predicted by existing models, even after extensive practice."
The Energy Flexibility Tradeoff
Through novel biomechanical modeling, the team quantified kinetic energy (KE) expenditure across potential trajectories, revealing a critical pattern:
# Simplified representation of energy landscape modeling
for trajectory in possible_paths:
ke = calculate_kinetic_energy(trajectory)
deviation = measure_divergence(trajectory)
energy_landscape[deviation] = ke
Key discoveries from the energy landscape analysis:
- Monkeys consistently selected trajectories within a "safe KE range" where energy costs remained stable despite path variations
- Late-session trajectories converged toward plateaus in the energy landscape (r = 0.696, p = 1.2e-6)
- Minimum-energy paths were often avoided when they offered less flexibility
"The motor system doesn't seek the absolute energy minimum, but rather a range where small trajectory adjustments don't penalize energy expenditure—a buffer zone for adaptability," the paper explains.
Implications for Technology Development
Robotics: Current motion planning algorithms prioritizing shortest paths or minimal energy could be replaced with models incorporating energy flexibility tradeoffs for more natural movement
Rehabilitation: Prosthetics and exoskeletons could mimic this "safe KE" principle to reduce user fatigue while maintaining movement adaptability
AI Motor Control: Reinforcement learning systems could incorporate energy-flexibility objectives rather than pure efficiency metrics
The researchers have open-sourced their biomechanical model to facilitate further development in these areas.
The Path Forward
While conducted in a constrained 2D environment, this research fundamentally reframes our understanding of motor optimization. As robotics increasingly interacts with human environments, systems that mirror biological movement principles—balancing efficiency with adaptability—will prove essential. The monkeys' reaching strategies suggest that sometimes, the most efficient path isn't the straightest or the most economical, but the one that preserves flexibility at minimal energy cost.
Comments
Please log in or register to join the discussion