A DIY project from SciCraft uses an ESP32 microcontroller, HC-SR04 ultrasonic sensor, and stepper motor to create a 360° sonar system with a live Processing-based radar UI, featuring clear, documented code and minimal hardware.
A DIY electronics project from maker SciCraft brings 360° ultrasonic sensing to the ESP32, creating a functional radar system that streams real-time object detection data to a PC-based visualization interface. The build uses off-the-shelf components and clean, well-documented code that prioritizes readability over complex abstractions.
The project was recently covered by technology writer Simon Batt, who highlighted its simplicity and accessibility for DIY enthusiasts. Batt notes that the build evokes the scanner systems seen in the Alien film franchise, with its rotating sensor and real-time radar display. SciCraft, the creator of the project, published a YouTube video demonstrating the build process and live operation, alongside uploading full source code and instructions to GitHub.
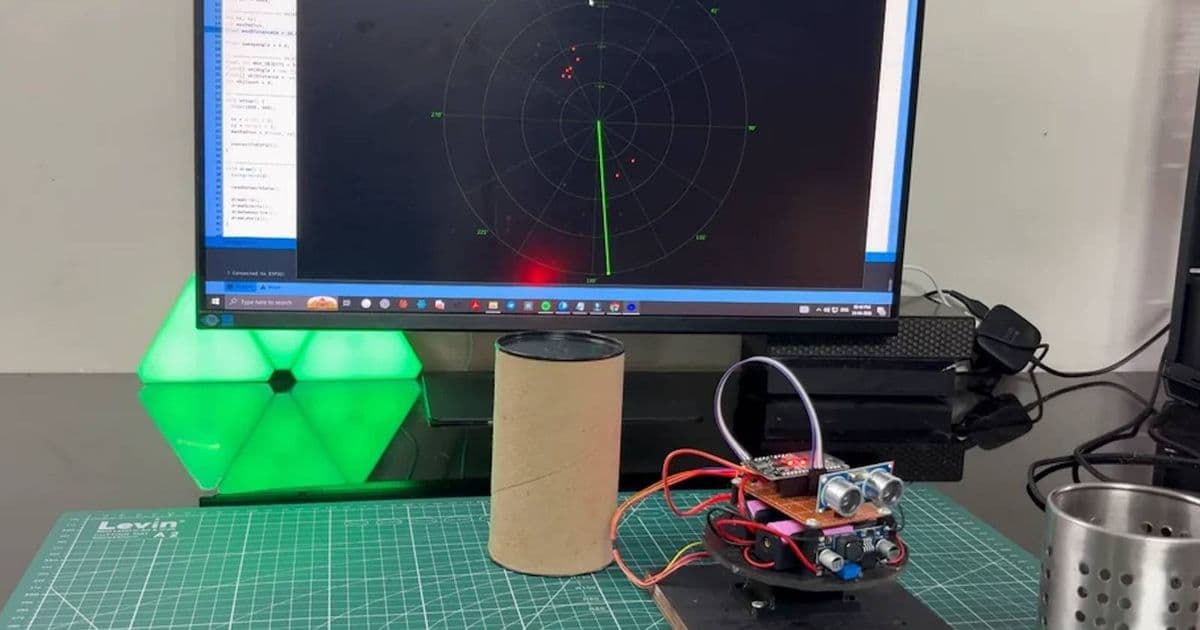
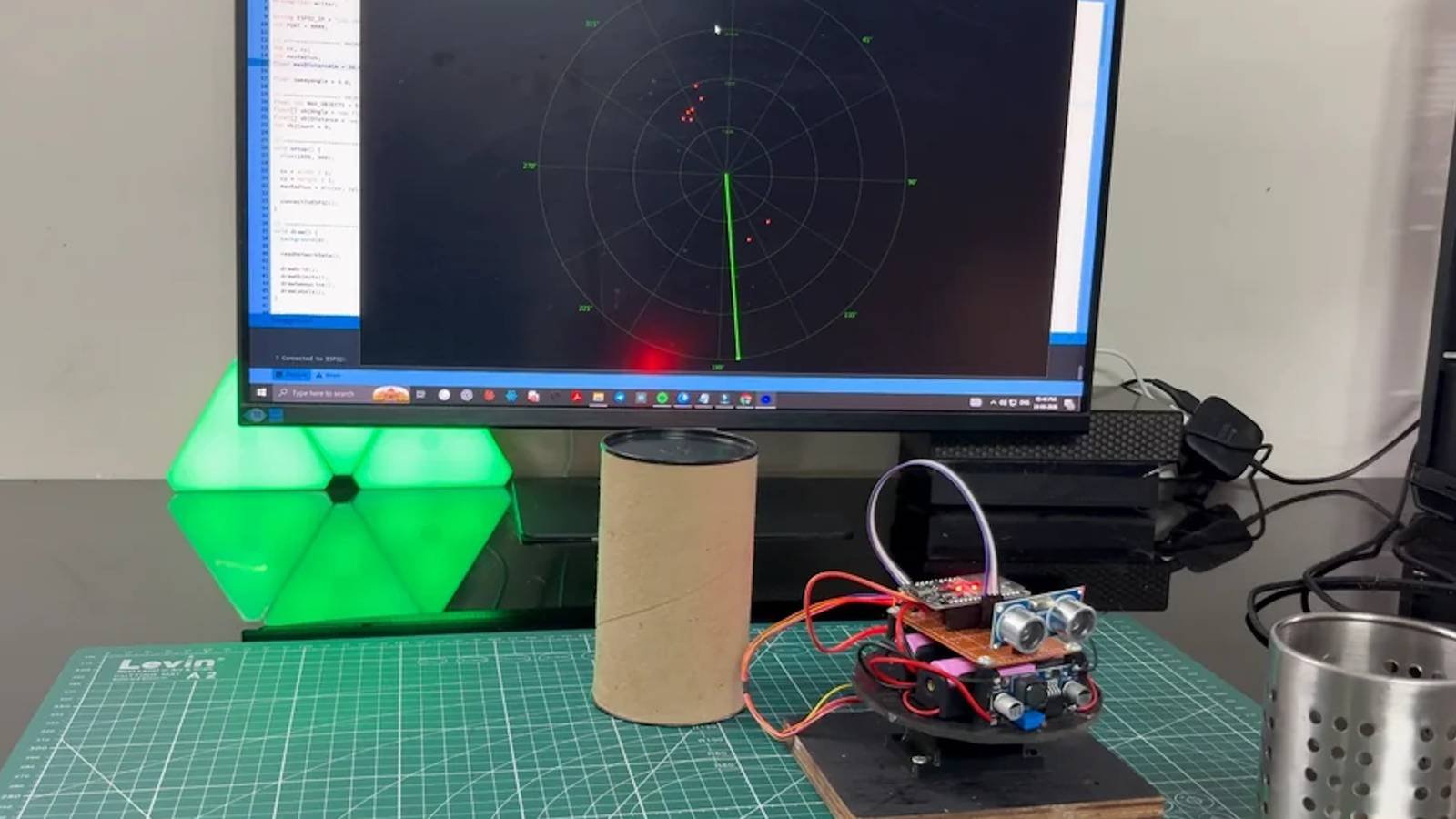
The hardware setup relies on four core components: an ESP32 microcontroller from Espressif, a widely used HC-SR04 ultrasonic sensor for distance measurement, a standard stepper motor to rotate the sensor, and a battery power source mounted on a rotating platform. SciCraft emphasizes that the ESP32 handles all processing tasks, with no secondary controller boards required, keeping the hardware setup minimal. The ESP32’s integrated WiFi, dual-core processor, and sufficient GPIO pins allow it to drive the stepper motor, read sensor data, and handle network communication without additional hardware.
The system operates via a continuous 360° sweep controlled by the ESP32. The microcontroller drives the stepper motor to rotate the HC-SR04 at regular angular intervals, typically every few degrees. At each interval, the sensor emits an ultrasonic pulse and measures the time it takes for the echo to return, calculating the distance to the nearest object. The ESP32 then packages the current angle and measured distance as a pair, transmitting these values over a TCP socket to a separate PC. The ESP32 TCP socket documentation details how the microcontroller manages this network communication natively.
The PC runs a custom UI built in Processing, an open-source environment designed for visual arts and prototyping. The UI listens for incoming TCP data from the ESP32, then plots each angle-distance pair as a point on a circular radar grid. Distance from the center of the grid corresponds to the detected object’s distance from the sensor, with closer objects appearing near the center and farther objects near the edge. The visualization updates in real time, matching the speed of the sensor sweep, creating a smooth display that mimics commercial radar systems.
SciCraft describes the project as a minimal, focused tool that answers a single core question: where are objects located around the device at every angle? It is not a sensor fusion system or a complex multi-sensor setup, avoiding unnecessary features that would bloat the code. The source code, hosted on GitHub, is written with readability as a priority. Each function is commented to explain its purpose, covering stepper motor control, ultrasonic sensor reading, and TCP data transmission. SciCraft encourages users to read and understand the logic rather than copying and pasting the code without context, making the project a useful learning resource for beginners in embedded development.
The build stands out from other DIY sonar projects by running all tasks on a single ESP32. Many similar projects use Arduino boards paired with separate WiFi modules or motor driver boards, increasing hardware cost and complexity. This project leverages the ESP32’s native capabilities to keep the component count low, with total parts cost estimated under $20. The HC-SR04 sensor offers a detection range of 2cm to 400cm with approximately 3mm accuracy, sufficient for indoor hobbyist use cases like room mapping, obstacle detection for small robots, or interactive art installations.
Related ESP32 projects highlight the microcontroller’s versatility for low-cost DIY builds. A $30 ESP32-powered spy car with a live camera feed uses the same microcontroller to handle motor control, wireless video streaming, and remote control inputs. 
Other weekend-friendly builds include RGB LED matrix displays, smart home sensors, and portable gaming devices. An RGB LED matrix panel paired with an ESP32 can display real-time data like time, date, or sensor readings from projects like the 360° sonar. 
The Processing UI used in this project is lightweight, running on most modern PCs without specialized graphics hardware. Users can modify the UI code to adjust the radar’s visual style, change the maximum detection range, or add alerts for objects detected within a certain distance. The ESP32 code is similarly modular, allowing developers to adjust the sweep speed, change the angular interval between readings, or add additional sensors like temperature or humidity modules.
For hobbyists interested in 3D printing, the rotating platform and sensor mount can be custom-designed and printed, further reducing the project’s cost and allowing for custom form factors. SciCraft notes that the project’s simplicity makes it accessible to anyone with basic soldering skills and familiarity with uploading code to microcontrollers. The ESP32 can be programmed using the Arduino IDE or Espressif’s ESP-IDF, with the project code compatible with both environments.
Commercial 360° sonar systems, like those used in marine navigation or industrial robotics, often cost hundreds or thousands of dollars and use proprietary software. This DIY alternative demonstrates that functional, real-time sensing systems can be built at home with minimal investment, provided the code is written clearly and the hardware is selected for compatibility. The project’s focus on documentation and readability also addresses a common issue in DIY electronics, where code is often shared without explanation, making it difficult for new developers to learn from or modify.
Comments
Please log in or register to join the discussion