MIT researchers have developed a two‑step fabrication method that adds magnetic properties to 3D‑printed hydrogel structures after printing. The technique enables micron‑scale parts with tunable magnetism, allowing simple external magnets to trigger grippers, switches and other movable micro‑architectures for potential medical and microfluidic applications.
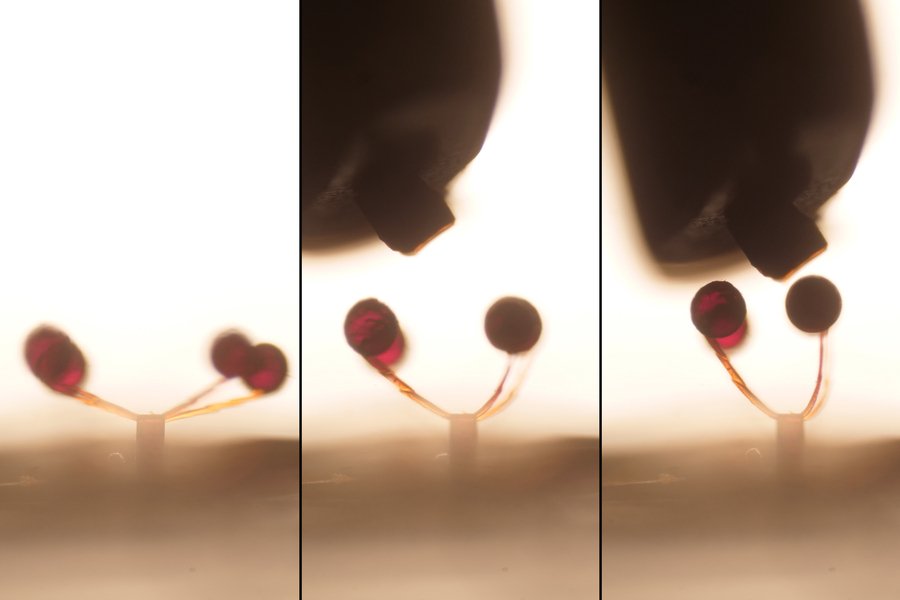
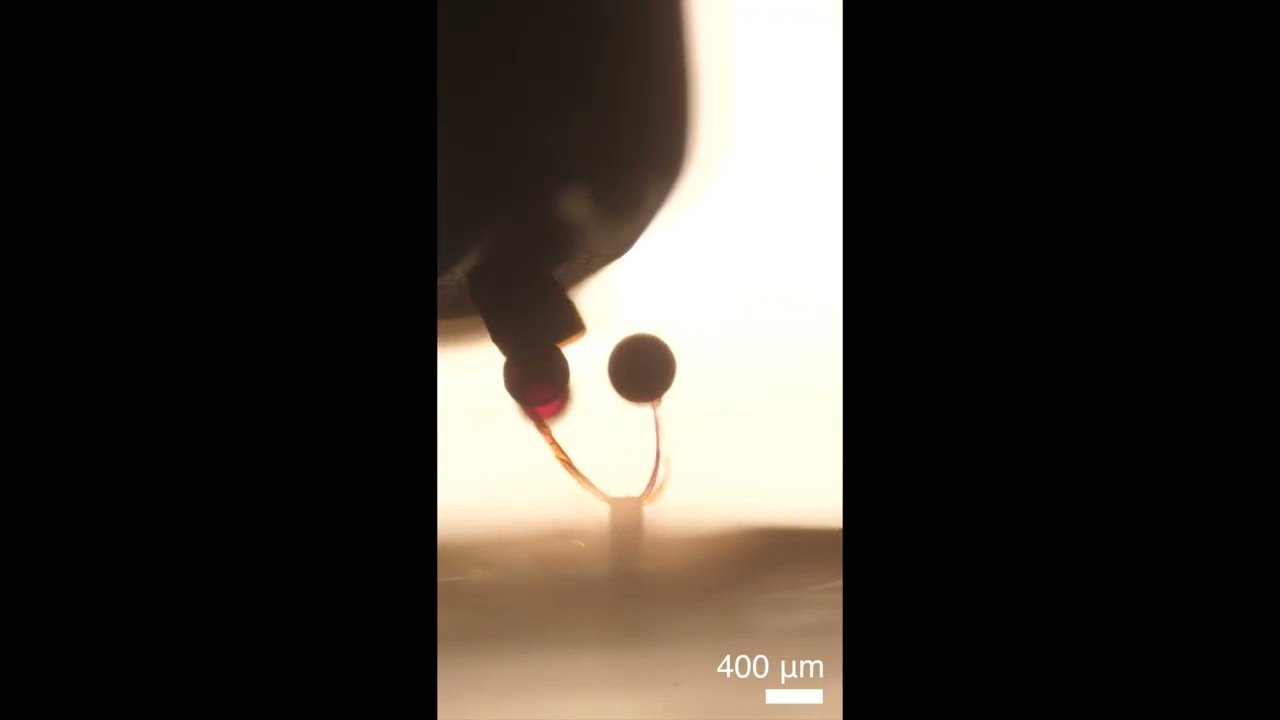
Under a microscope, a bouquet of lollipop‑shaped structures, each smaller than a grain of sand, waves gently in a petri dish of liquid. When a small magnet is swept over the dish, the tiny lollipops snap together like the jaws of a Venus flytrap, forming an active robotic gripper from previously passive shapes. This demonstration showcases a new soft magnetic hydrogel created by MIT engineers in collaboration with EPFL and the University of Cincinnati.
The team’s approach separates printing from magnetization. First, they use two‑photon lithography to build a polymer gel scaffold with the desired geometry, leaving the material free of magnetic particles. The printed scaffold is then dipped into a solution of iron ions, which the gel absorbs. A second dip in a hydroxide solution triggers a chemical reaction that forms iron‑oxide nanoparticles throughout the gel, imparting magnetism. Because the magnetic particles are created after the laser‑based printing step, they do not interfere with the light‑based curing process, avoiding the scattering and agglomeration problems that plague direct mixing of metals into resin.
By adjusting the laser power during the initial print, the researchers control how tightly cross‑linked each region of the gel becomes. Tighter regions absorb fewer iron ions and therefore develop weaker magnetic response, while looser regions can host more particles and become strongly magnetic. This spatial tuning lets them program different parts of a single structure to move independently when exposed to an external field.
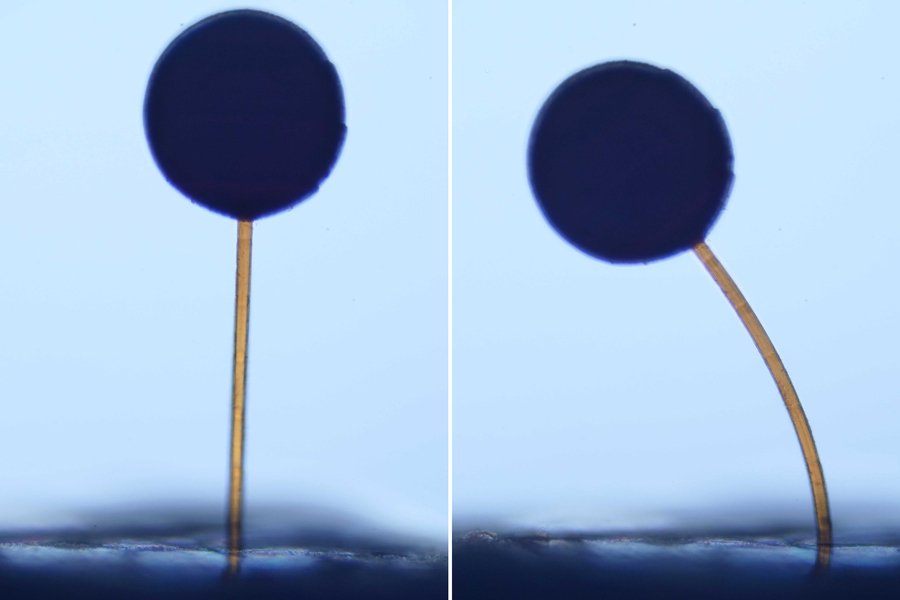
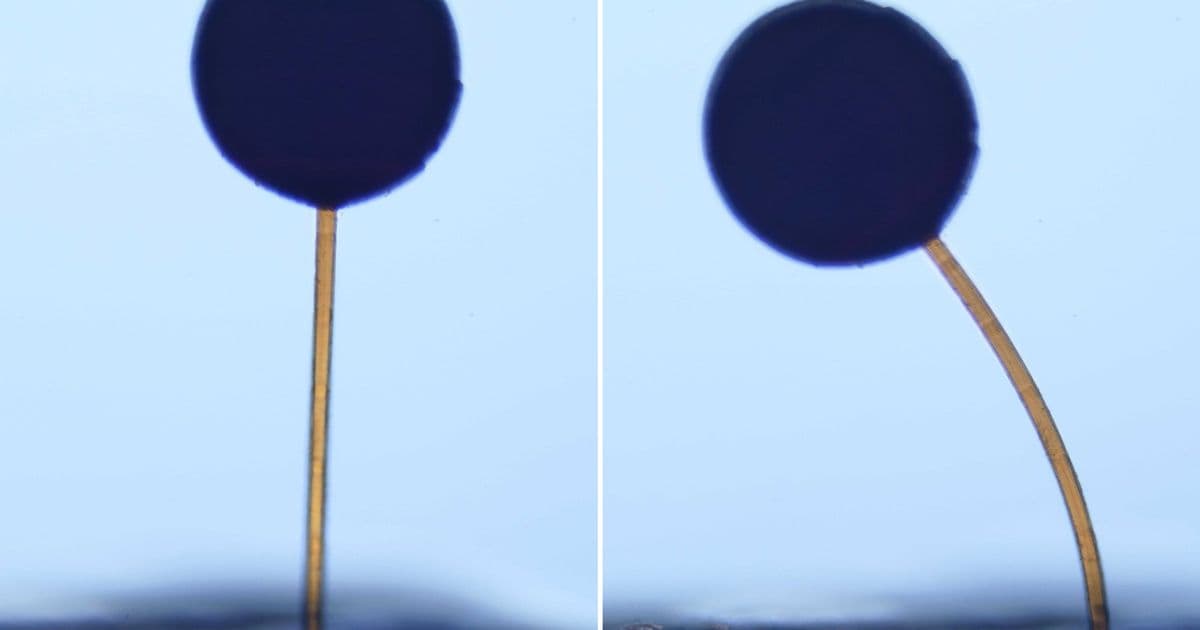
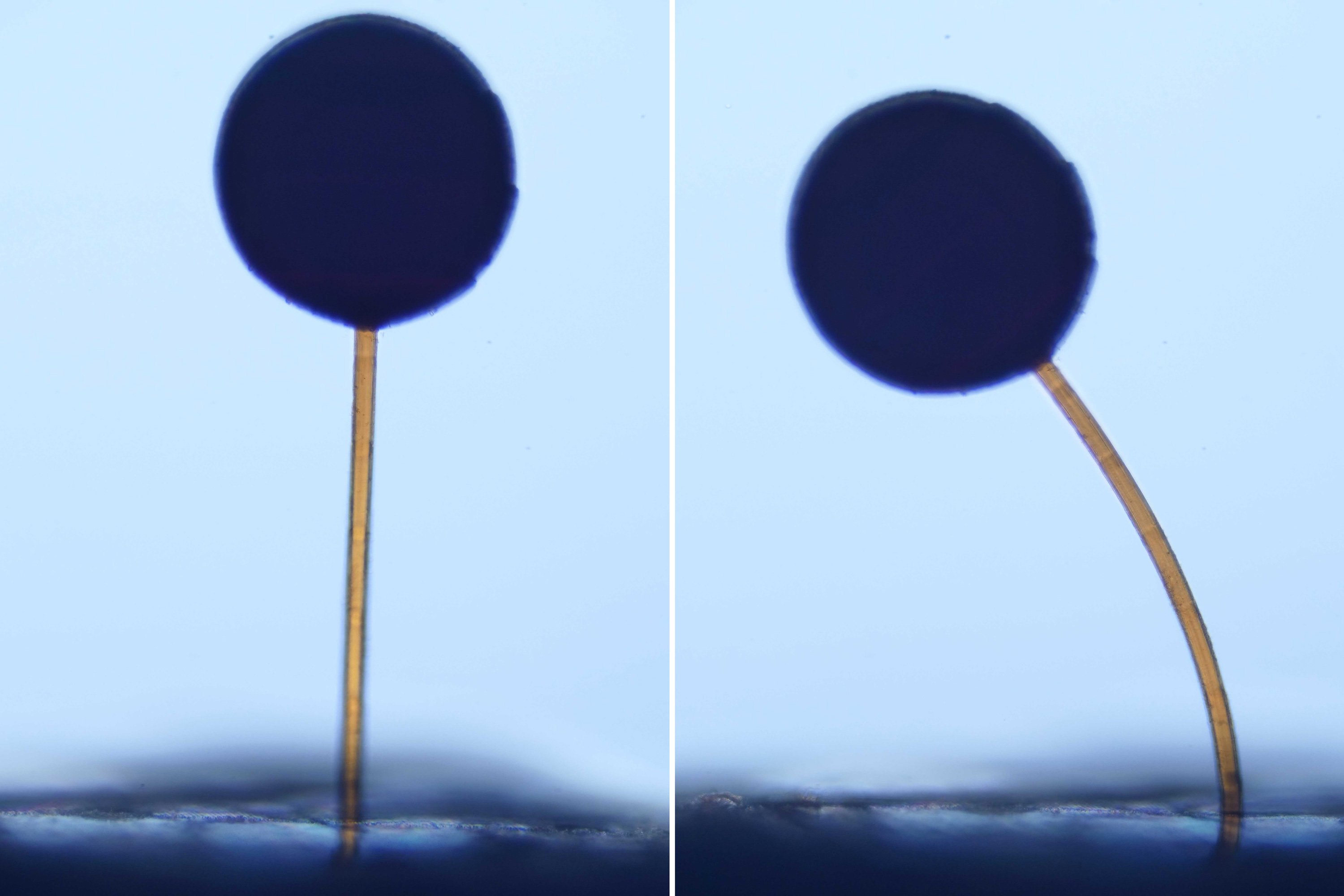
As a proof of concept, the team fabricated ball‑and‑stick shapes resembling miniature lollipops. Each ball measured less than a millimeter in diameter and contained varying amounts of magnetic material. When a common refrigerator magnet passed nearby, the balls bent toward the magnet at different rates, producing a grasping motion that mimicked fingers. The same principle was used to build a bistable switch: a millimeter‑long rectangle with four oar‑like magnetic extensions on each side. Applying a magnet to one side caused the oars to flip and lock the rectangle in place; moving the magnet to the opposite side reversed the motion, effectively toggling the structure.
Portela’s group envisions these magno‑bots serving as untethered tools in biomedical settings. A magnetically guided gripper could navigate through blood vessels to capture a tissue sample or release a drug payload at a specific site. In microfluidic devices, the bistable switch could act as a remote‑operated valve, opening or closing channels without mechanical actuators.

The technique does have limits. The magnetic strength achievable depends on the amount of iron‑oxide that can be formed within the gel, which is constrained by the gel’s porosity and the diffusion of ions during the dipping steps. Additionally, while the structures respond instantly to magnetic fields, they require a fluid environment to prevent stiction and to allow the hydrogel to swell and deform as intended.
The study, published in the journal Matter, was supported by the National Science Foundation and the MathWorks seed grant program, with work carried out in MIT.nano’s fabrication and characterization facilities. By decoupling the printing and magnetization stages, the researchers have opened a path to create complex, remotely controllable micro‑machines that combine the precision of two‑photon lithography with the versatility of soft, stimuli‑responsive materials.
Comments
Please log in or register to join the discussion