MIT and University of Pennsylvania researchers developed MIGHTY, an innovative trajectory planning system that enables UAVs to navigate complex environments faster and more efficiently than current methods. By using Hermite splines to optimize path and time simultaneously, the open-source system achieves real-time obstacle avoidance while maintaining smooth trajectories, with significant applications in disaster recovery, last-mile delivery, and industrial inspection.
In the aftermath of natural disasters or in complex urban environments, unmanned aerial vehicles (UAVs) have the potential to provide critical assistance by mapping dangerous areas or delivering essential supplies. However, the challenge of real-time navigation through unpredictable obstacles while maintaining efficient trajectories has limited their widespread adoption. Researchers from MIT and the University of Pennsylvania have addressed this limitation with MIGHTY (Mathematically Improved Hermite-based Traplanning sYstem), an open-source trajectory planning system that enables UAVs to react to obstacles in milliseconds while following smooth, time-optimal paths.
Technical Innovation: Hermite Splines and Joint Optimization
Traditional trajectory planning systems often face a fundamental trade-off: some commercial solutions can generate smooth trajectories quickly but cost hundreds of thousands of dollars, while open-source alternatives typically underperform or are computationally inefficient. MIGHTY overcomes these limitations through a novel mathematical approach that optimizes both spatial and temporal components simultaneously.
At the core of MIGHTY is the use of Hermite splines, a mathematical technique that allows the system to optimize the flight path and travel time in a single step. This joint optimization produces smoother, more controllable trajectories compared to methods that first estimate travel time and then find the best path. "Optimizing the spatial and temporal components together gets us better results," explains Kota Kondo, lead author of the paper and an aeronautics and astronautics graduate student at MIT. "But now the optimization becomes so much bigger that it is harder to solve in a feasible amount of time."
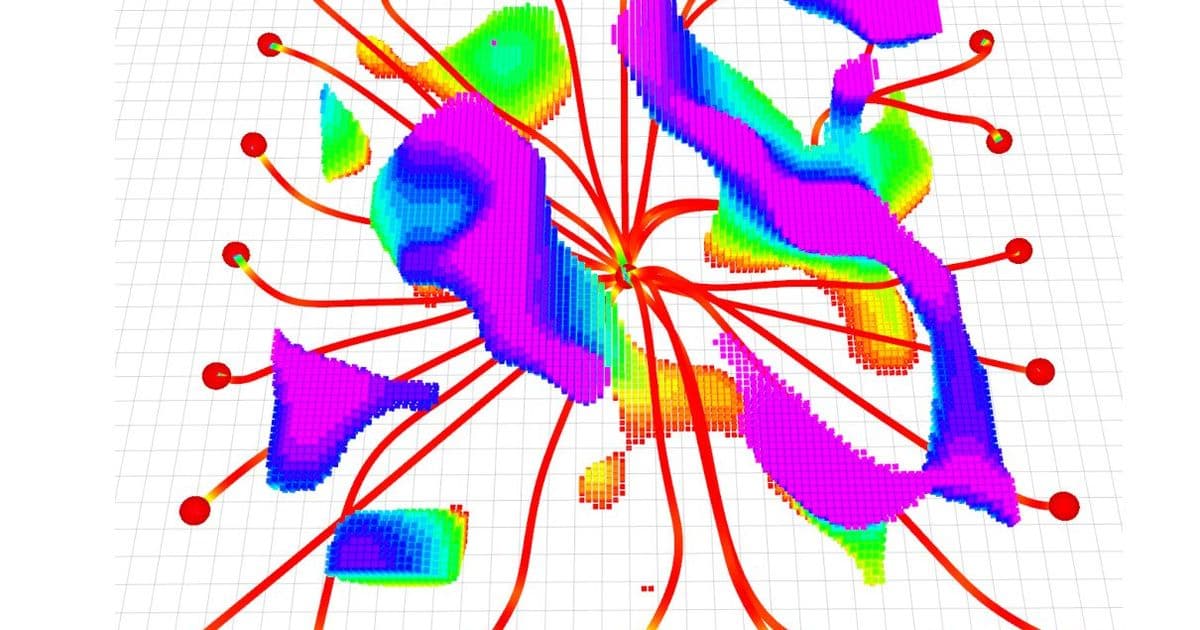
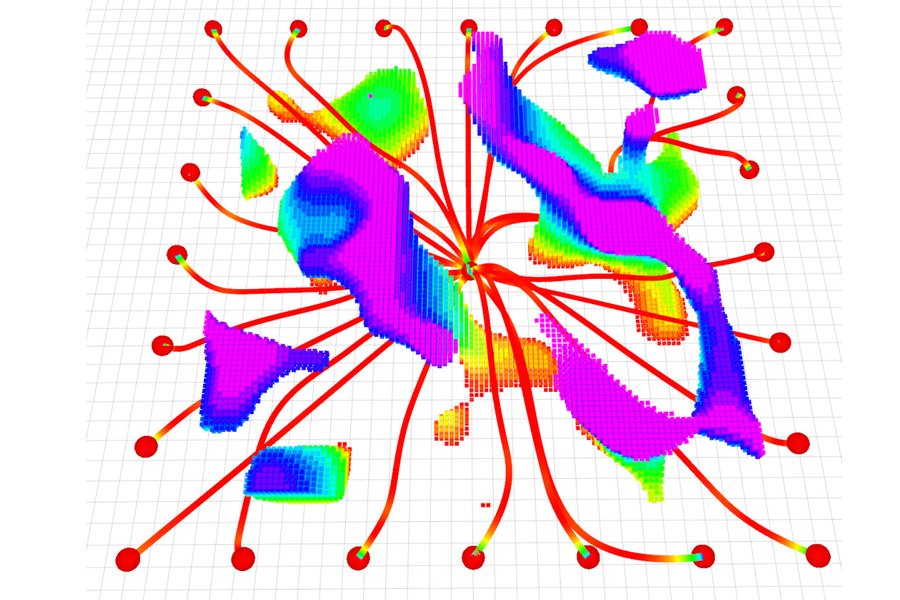
To address the computational challenge, the researchers implemented an iterative refinement approach. Instead of generating trajectories from scratch each time, MIGHTY starts with an initial guess and refines it using real-time data from the UAV's onboard lidar sensors. "We can make a decent guess of what the trajectory should be, which is a lot faster than generating the entire thing from nothing," Kondo notes. This method enables the system to react to unexpected obstacles while maintaining trajectory smoothness and minimizing travel time.
Performance Advantages
In simulated experiments, MIGHTY demonstrated significant performance improvements over existing methods. The system required only about 90% of the computation time needed by state-of-the-art approaches while safely reaching its destination approximately 15% faster. When tested on physical robots, the system achieved speeds of 6.7 meters per second while successfully avoiding all obstacles in its path.
"With MIGHTY, everything is integrated in one piece," Kondo emphasizes. "It doesn't need to talk to any other piece of software to get a solution. This helps us be even faster than some of the commercial solvers."
The system's efficiency is particularly notable given that it runs entirely on the UAV's onboard computer and sensors. This capability is crucial for applications where robots might operate far from a base station, as it eliminates the need for constant communication with external computing resources.
Real-World Applications
MIGHTY's capabilities open doors for numerous practical applications across different sectors:
Disaster Response and Search-and-Rescue
The system's ability to navigate through complex, unpredictable environments makes it ideal for disaster scenarios. Following events like earthquakes or building collapses, UAVs equipped with MIGHTY could map dangerous areas to locate survivors without endangering human responders. Kondo's inspiration for this work stems from his childhood experience during the Fukushima nuclear disaster: "I became passionate about creating autonomous robots that can go into these dynamic and dangerous situations, then come back and report to humans who stay out of harm's way."
Last-Mile Delivery
In urban environments, MIGHTY could enable UAVs to navigate around buildings, power lines, and pedestrians to deliver packages efficiently. The system's real-time obstacle avoidance capabilities would be particularly valuable in densely populated areas where unexpected hazards frequently appear.
Industrial Inspection
For inspecting complex infrastructure like wind turbines, bridges, or pipelines, MIGHTY could guide UAVs along optimal paths that provide comprehensive coverage while minimizing inspection time. The system's ability to generate smooth trajectories would also reduce mechanical stress on the UAV, potentially extending equipment lifespan.

Democratizing High-Performance Trajectory Planning
One of MIGHTY's most significant contributions is its open-source nature. Unlike many high-performance trajectory planning systems that cost hundreds of thousands of dollars and rely on proprietary software, MIGHTY is freely available to researchers, students, and companies worldwide.
"MIGHTY achieves comparable or better performance using only open-source tools, which means any researcher, student, or company — anywhere in the world — can use it freely," Kondo states. "By removing this cost barrier, MIGHTY helps democratize high-performance trajectory planning and opens the door for a much broader community to build on this work."
This accessibility could accelerate innovation in trajectory planning and UAV navigation, as researchers and developers without substantial funding can now experiment with state-of-the-art planning algorithms.
Limitations and Future Directions
While MIGHTY demonstrates impressive performance, the researchers acknowledge several areas for improvement. Currently, the system has been primarily tested in simulations and controlled environments. More extensive flight experiments in challenging real-world conditions are needed to validate its robustness.
Future work also includes extending the system to coordinate multiple UAVs simultaneously, which would enable applications like collaborative search-and-rescue operations or distributed package delivery. The researchers plan to continue enhancing MIGHTY based on user feedback and real-world deployment experiences.
"MIGHTY makes an important contribution to agile robot navigation by revisiting the trajectory representation itself," comments Davide Scaramuzza, professor and director of the Robotics and Perception Group at the University of Zurich, who was not involved with the research. "Hermite splines have already been successfully used in visual simultaneous localization and mapping, and it is nice to see their advantages now being exploited for trajectory planning in mobile robots."
The research paper, "MIGHTY: Hermite Spline-based Efficient Trajectory Planning," was published in IEEE Robotics and Automation Letters and funded in part by the United States Army Research Laboratory and the Defense Science and Technology Agency in Singapore. The open-source code is available for researchers and developers to build upon and adapt for their specific applications.
As autonomous systems become increasingly prevalent in our daily lives, innovations like MIGHTY that improve navigation efficiency and accessibility will play a crucial role in expanding the capabilities of robotic systems across diverse domains.
Comments
Please log in or register to join the discussion