From screw-driven tractors to omni-directional robots, explore the fascinating history of attempts to solve the wheel's fundamental limitations.
The wheel stands as one of humanity's most enduring inventions, a simple yet revolutionary technology that has shaped transportation and commerce for millennia. Yet for all its brilliance, the wheel carries two inherent limitations: it requires extensive infrastructure to function optimally, and it stubbornly moves only in the direction it's pointing. For nearly 200 years, inventors and engineers have attempted to overcome these constraints, creating a lineage of alternative locomotion systems that tell us as much about human ingenuity as they do about the limitations of our most basic machine.
The Archimedean Screw: When Wheels Meet Augers
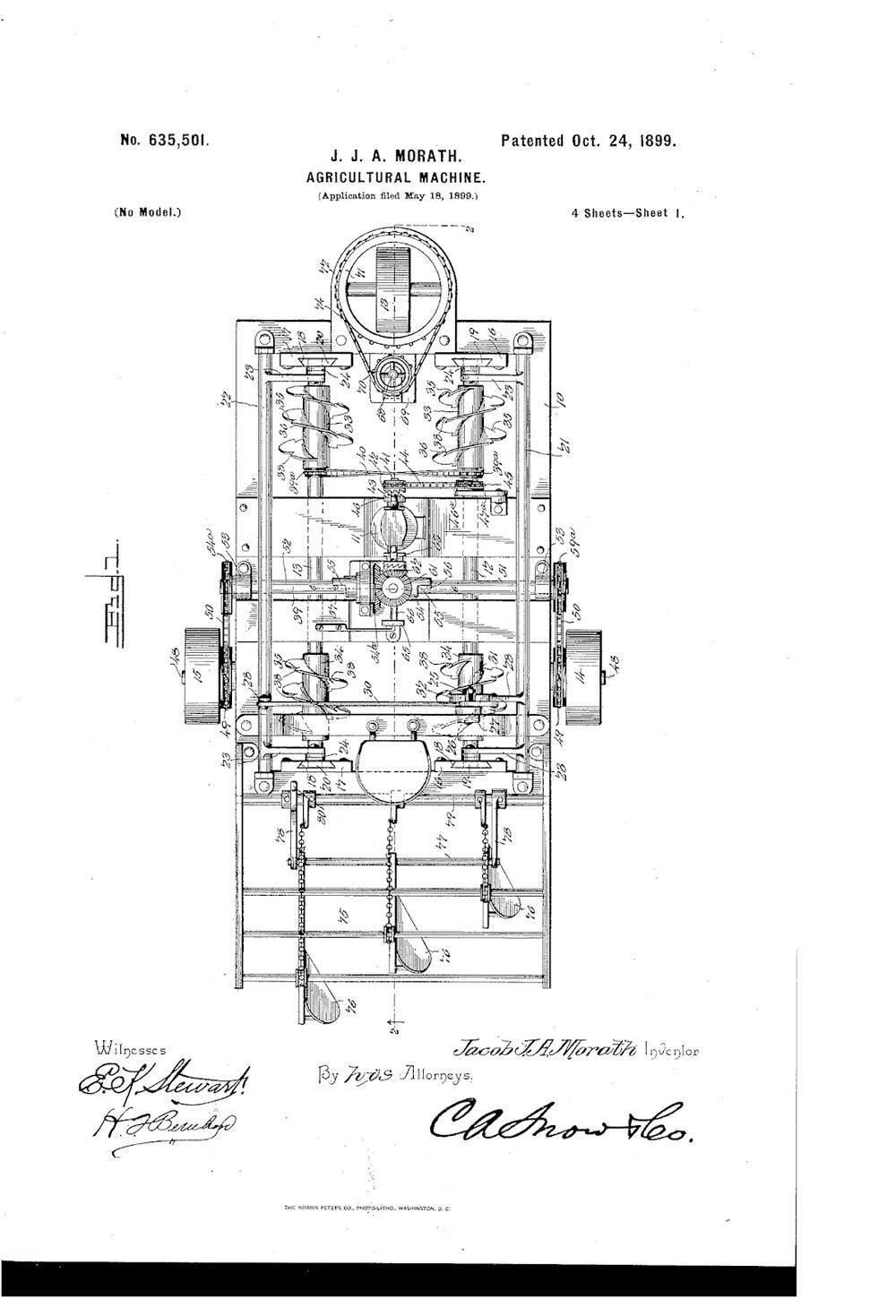
The story of wheel reinvention begins in 1899 with Jacob Morath's patent for an "Agricultural Machine" that replaced traditional wheels with counter-revolving augers. These sharp, screw-like propellers would both plow fields and propel the vehicle forward simultaneously. The genius of Morath's design lay in its stability—counter-revolving screws naturally compensate for side-to-side motion, particularly when they're significantly longer than they are wide.
"Since the two screws are counter-revolving, they compensate for any side-to-side motion, particularly since they're so much longer than they are wide," explains John Ohno, the article's author. "Such a device could drive in a straight line across reasonably stable terrain, tearing up the earth as it did."
Steering presented an interesting challenge, which Morath solved by incorporating conventional wheels that would raise as the screws lowered and vice versa. Eight years later, competitor Peevey improved upon this design by raising or lowering one screw, causing the vehicle to pivot toward the lowered screw—a principle that would later appear in various wheel assemblies.
Despite their ingenuity, screw vehicles never found success in agriculture. Morath's design appears never to have been built, and later variations couldn't compete with emerging tank tread technology. However, the concept found brief commercial success in the 1920s with the Armstead Snow Motor, which beefy barrels could attach to existing vehicles to traverse deep snow. During World War II, visionary Geoffrey Pyke (who also famously proposed aircraft carriers made of frozen paper mache) advocated for screw drives over tank treads for snow warfare, but again, tank treads prevailed.

Screw vehicles finally found their niche in the 1960s on water. A large hollow barrel with an external screw functioned adequately on snow, dirt, and mud while also acting as a floating propeller. These theoretically all-terrain machines rarely lived up to their promise in practice, finding specialized use with Soviet cosmonauts who might need to traverse varied terrain during emergencies.
Wheels Within Wheels: The Geometry of Motion
One fascinating aspect of screw locomotion is that it moves perpendicular to the direction a conventional wheel would travel. This geometric insight opened possibilities for compound wheels—multi-component assemblies that enable movement in multiple directions without steering.
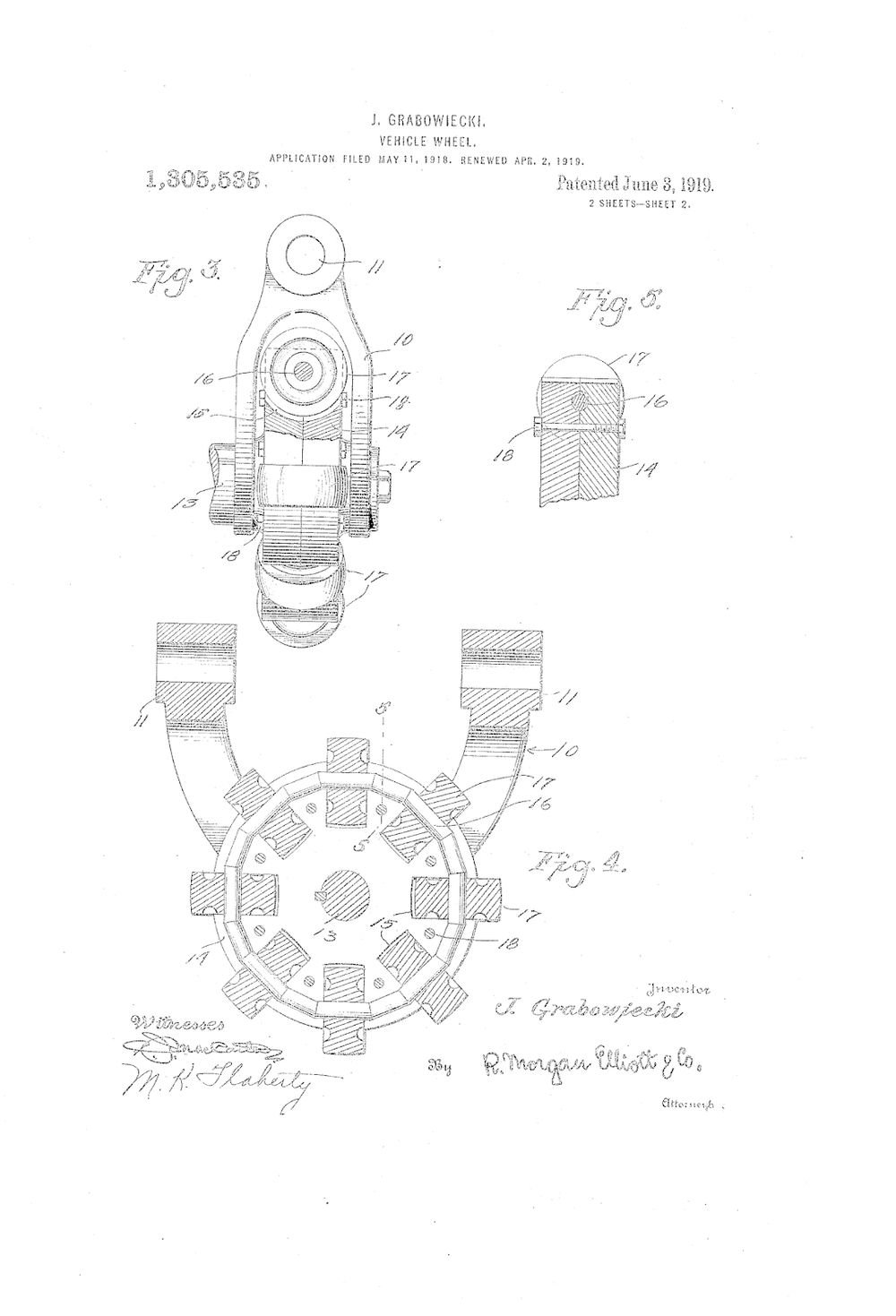
The simplest of these is the omni wheel, where smaller powered wheels are mounted perpendicularly around the edge of a larger wheel. By stopping the main wheel and activating the smaller ones, a vehicle can move at a right angle, albeit slowly due to the reduced contact surface. Developed in 1919, the omni wheel represents an early attempt to solve the directional constraint of traditional wheels.
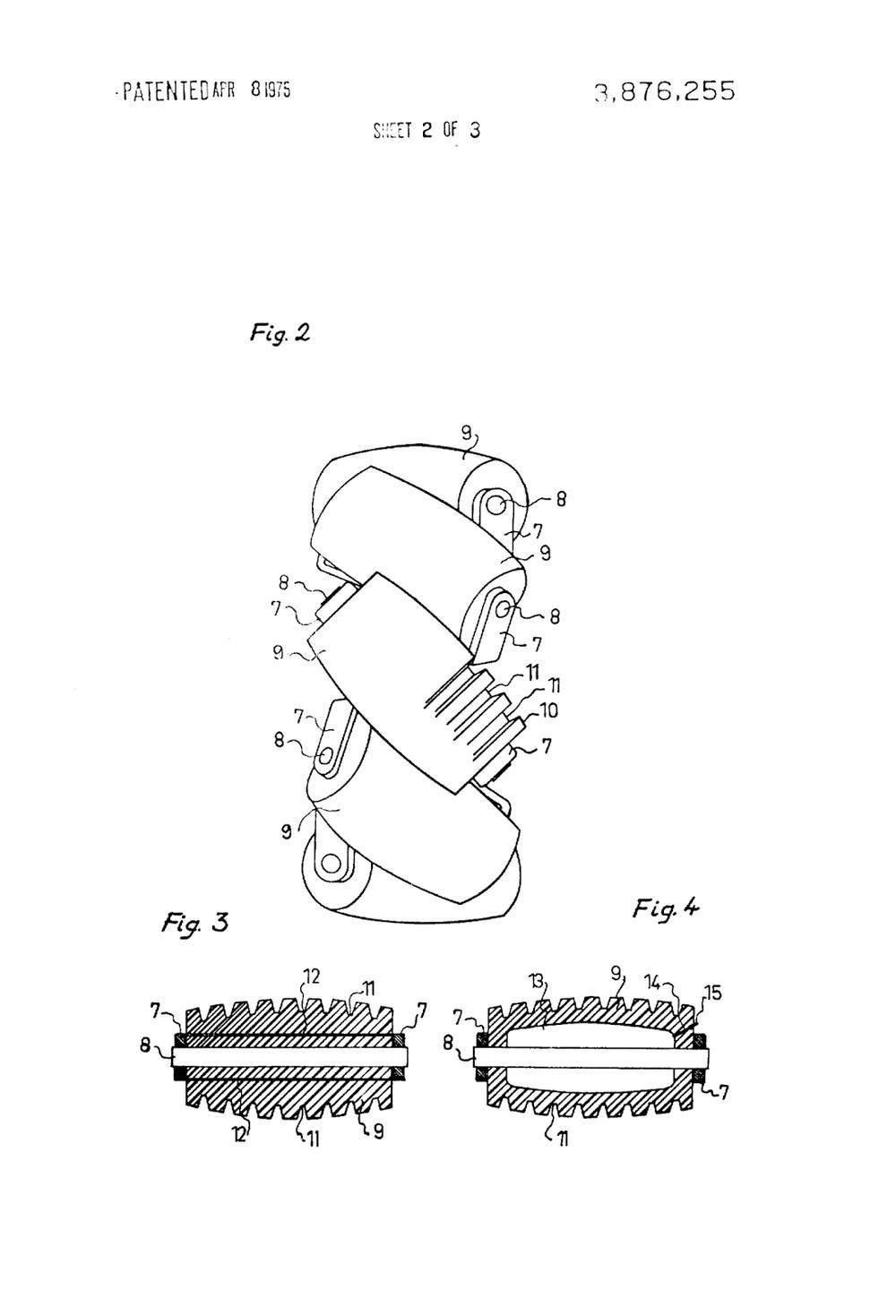
More sophisticated is the Ilon wheel (also known as the Mechanum wheel or Swedish wheel), invented in 1972. This design features powered wheels mounted at a 45-degree angle around the main wheel's circumference, essentially creating a screw made of wheels. A single Ilon wheel can move along two axes, while four can enable rotation in place as well as lateral movement.
"The problem with all of these is that the actual amount of surface area you are rotating against the ground depends upon the direction you're moving," Ohno notes. "And so, all of the exotic motions that these wheels are capable of are very slow when used on something heavy (like a vehicle). Instead, these wheels are largely used in robots and sorting machines."
The Tri-Star Revolution: From Boeing to Hollywood
In the late 1960s, engineers at Boeing attempted to adapt the wheels-within-wheels concept for all-terrain vehicles by reducing the central wheel to an abstract concept. The resulting tri-star wheel arrangement consists of three wheels linked in a triangle, allowing the assembly to flip over obstacles while maintaining power to each wheel through a shared source.
"On solid ground, you drive on two wheels; if you hit a pothole deep enough to trap an ordinary vehicle, instead, the whole assembly will flip over and you'll drive on barely noticing a bump," Ohno explains. "Unlike the screw drive, whose relationship with the ground is tenuous at best and who wastes a huge amount of energy in slippage, each wheel in the tri-star configuration is potentially quite ordinary."
Despite their advantages, tri-star wheels never saw widespread adoption. The added complexity—three times the wheels and tires, plus additional framework and power transfer hardware—coupled with poor turning characteristics, limited their appeal. Even the military showed only modest interest, testing one on a prototype howitzer in the 1970s before abandoning the concept.
Instead, tri-star wheels found fame in Hollywood, most notably as the wheels of the Landmaster in the 1977 film "Damnation Alley." The armored amphibious tank remains the film's most memorable element, inspiring an unrelated electric tractor that borrowed its name but not its wheel system.
Today, tri-star wheels have found practical application in stair-climbing wheelchairs, particularly those developed by Dean Kamen (who was known for these inventions before the Segway brought him wider fame). NASA, meanwhile, has opted for its spidery rocker-bogie suspension system, which provides better stability with fewer moving parts.
Holonomic Platforms: The Mathematics of Movement
Perhaps the most sophisticated approach to wheel reinvention involves not individual wheels but their arrangement in a platform. The differential drive system, using two independently powered wheels and a caster, allows for forward/backward movement, gradual turns, and tight spins. However, this design suffers from instability at higher speeds and the tendency of casters to get caught on obstacles.
The solution came in the form of holonomic drive platforms, which use three wheel assemblies arranged in a triangle. When these assemblies incorporate omni or Ilon wheels, the configuration is called a kiwi platform. If they use "linear wheels" (pairs of thick wheels at right angles to each other), it becomes a Killough platform. These designs enable movement in any direction with minimal slipping, though they require complex computer control and mathematical calculations.
"These platforms can do all sorts of impressive acrobatics, but they require computer control—steering involves a lot of math—so they are mostly used in robots, and not in manned or remote-control vehicles," Ohno observes. "In fact, it was hard for me to find pictures of holonomic drive platforms not made of Legos!"
While industrial applications exist, holonomic drives experienced a brief vogue in high school and college robotics clubs about 20 years ago, inspiring a generation of engineers who now apply these principles in their professional work.
The Evolutionary Pattern of Innovation
The history of wheel reinvention reveals an interesting pattern: technologies that seem revolutionary often remain limited until design refinements coincide with infrastructure improvements. The caster wheel, for example, dates to the mid-18th century but wasn't widely used outside furniture manufacturing until the mid-19th century. Similarly, the tank tread emerged around the same time as the Archimedean screw but ultimately proved more practical.
"In many ways, the wheel itself is 'new': the myth of the wheel as the most monumental invention is itself an invention of the 20th century, when road infrastructure was massively expanded to support those new wheeled inventions—cars and bicycles," Ohno writes. "Only with nicely-paved and well-maintained modern asphalt roads going everywhere you want to go does it become obviously better to take a vehicle with wheels rather than riding an animal or walking."
This pattern repeats across wheel innovations: the technology remains in limited use until both the design and supporting infrastructure mature simultaneously. As we continue to develop new transportation technologies—from electric vehicles to autonomous drones—the lessons from 200 years of wheel reinvention remind us that successful innovation requires not just clever engineering but also thoughtful development of the systems that enable it to flourish.
Comments
Please log in or register to join the discussion